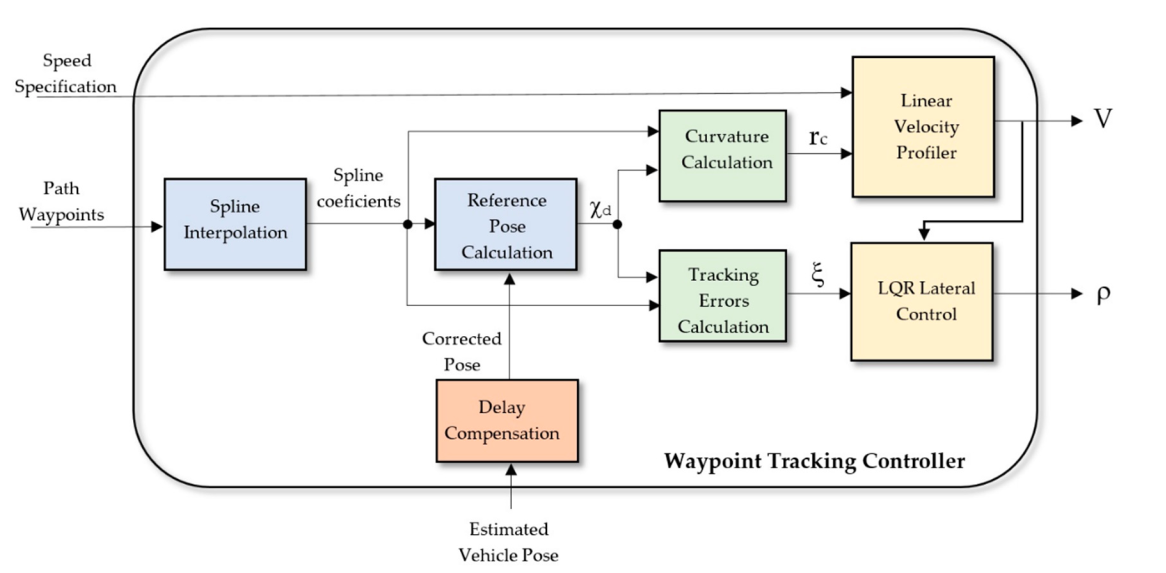
Automated Driving Systems (ADSs) require robust and scalable control systems in order to achieve a safe, efficient and comfortable driving experience. Most global planners for autonomous vehicles provide as output a sequence of waypoints to be followed. This paper proposes a modular and scalable waypoint tracking controller for Robot Operating System (ROS)-based autonomous guided vehicles. The proposed controller performs a smooth interpolation of the waypoints and uses optimal control techniques to ensure robust trajectory tracking even at high speeds in urban environments (up to 50 km/h). The delays in the localization system and actuators are compensated in the control loop to stabilize the system. Forward velocity is adapted to path characteristics using a velocity profiler. The controller has been implemented as an ROS package providing scalability and exportability to the system in order to be used with a wide variety of simulators and real vehicles. We show the results of this controller using the novel and hyper realistic CARLA Simulator and carrying out a comparison with other standard and state-of-art trajectory tracking controllers.
@article{gutierrez2020controller,
author = {Gutiérrez-Moreno, Rodrigo and López-Guillén, Elena and Bergasa, Luis Miguel and Barea, Rafael and Pérez, Óscar and Gómez-Huelamo, Carlos and Arango, Felipe and del Egido, Javier and López-Fernández, Joaquín},
title = {A Waypoint Tracking Controller for Autonomous Road Vehicles Using ROS Framework},
journal = {Sensors},
year = {2020},
}